成果简介
在石油钻井、大陆科学钻探等深井钻进过程中,起下钻作业占据了大量的辅助时间。通常为了节省起下钻时间,钻杆大多以两根或两根以上的钻杆柱形式进行接卸。钻杆柱有序排列在钻井平台立根盒和二层台指梁之间,对于陆地钻机而言,钻杆柱是垂直排放的。为完成钻杆柱接卸工作,必须有一位钻工在二层台操作吊卡并借助绞车运移钻杆,此项工作劳动强度大且不安全。此外,为了提高钻杆柱的接卸效率,对钻工的操作技能也提出了较高的要求。运用仿生学相似理论,模拟人工运移,研制了全液压自动摆排管机。全液压自动摆排管机属于大型的工业机器人,能够代替人工实现钻杆在井口与排放架间往复传送、排放,提高钻杆传送的自动化水平,使工作人员可以远离恶劣工作环境和危险区域。
研究团队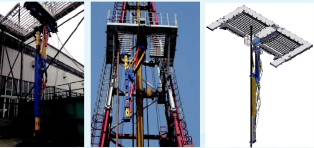
建设工程学院孙友宏教授研发团队。
成果成熟度
小批量。
应用领域及市场前景
本成果主要应用于深井钻探装备、石油天然气钻井装备领域,用以实现钻杆柱自动传送及排放问题。可以自动实现钻具在井口与排放架之间的移运、定位、排放、储运等作业流程,在深井钻探装备、石油天然气钻井装备等领域有着广泛的市场需求,很多钻井施工现场亟待安装自动摆排管机。而目前国外仅有为数不多的公司生产陆地钻机自动摆排管机产品,且价格昂贵;而国内尚缺少成型的产品,因此,本成果具有广阔的应用前景及市场需求。
合作方式
技术转让。
